MOTOR ELÉCTRICO
Guillermo Carvajal Rincón
![]()
2016
Tabla de contenido
|
Actividad interactiva - El ahorcado Actividad interactiva - Asociación |
2 5 11 12 15 20 21 24 30 31 |
Introducción
Una máquina eléctrica es un dispositivo capaz de transformar cualquier forma de energía en energía eléctrica o a la inversa y también se incluyen en esta definición las máquinas que transforman la electricidad en la misma forma de energía pero con una presentación distinta más conveniente a su transporte o utilización. Se clasifican en tres grandes grupos: generadores, motores y transformadores.
Los generadores transforman energía mecánica en eléctrica, mientras que los motores transforman la energía eléctrica en mecánica haciendo girar un eje. El motor se puede clasificar en motor de corriente continua o motor de corriente alterna. Los transformadores y convertidores conservan la forma de la energía pero transforman sus características.
Una máquina eléctrica tiene un circuito magnético y dos circuitos eléctricos. Normalmente uno de los circuitos eléctricos se llama excitación, porque al ser recorrido por una corriente eléctrica produce los amperiosvueltas necesarios para crear el flujo establecido en el conjunto de la máquina.
https://es.wikipedia.org/wiki/Máquina_eléctrica
2
Desde una visión mecánica, las máquinas eléctricas se pueden clasificar en rotativas y estáticas. Las máquinas rotativas están provistas de partes giratorias, como las dinamos, alternadores, motores. Las máquinas estáticas no disponen de partes móviles, como los transformadores.
En las máquinas rotativas hay una parte fija llamada estátor y una parte móvil llamada rotor. Normalmente el rotor gira en el interior del estátor. Al espacio de aire existente entre ambos se le denomina entrehierro. Los motores y generadores eléctricos son el ejemplo más simple de una máquina rotativa.
3
1. Motores Eléctricos
Los motores eléctricos son máquinas eléctricas que transforman en energía mecánica la energía eléctrica que absorben en sus bornes. Atendiendo al tipo de corriente utilizada para su alimentación, se clasifican en:
- Motores de corriente continua
o De excitación independiente
o De excitación serie
o De excitación (shunt) o derivación
o De excitación compuesta (compound)
- Motores de corriente alterna
Síncrono
Asíncrono
Monofásicos
De bobinado auxiliar
De espira en cortocircuito
Universal
Trifásicos
De rotor bobinado
De rotor en cortocircuito (jaula de ardilla)
5
Todos los motores de corriente continua así como los síncronos de corriente alterna incluidos en la clasificación anterior tienen una utilización y unas aplicaciones muy específicas.
Los motores de corriente alterna asíncronos, tanto monofásicos como trifásicos, son los que tienen una aplicación más generalizada gracias a la facilidad de su utilización, poco mantenimiento y bajo costo de fabricación. Por ello nos centraremos en la constitución, el funcionamiento y la puesta en marcha de los motores asíncronos de inducción.
La velocidad de sincronismo de los motores eléctricos de corriente alterna viene definida por la expresión:
N = 60f/ p
Dónde:
N = número de revoluciones por minuto
F= frecuencia de la red
P = número de pares de polos de la máquina
Se da el nombre de motor asíncrono al motor de corriente alterna cuya parte móvil gira a una velocidad distinta a la de sincronismo. Aunque a frecuencia industrial la velocidad es fija para un determinado motor, hoy día se recurre a variadores de frecuencia para regular la velocidad de estos motores.
6
A. Constitución del motor asíncrono de inducción
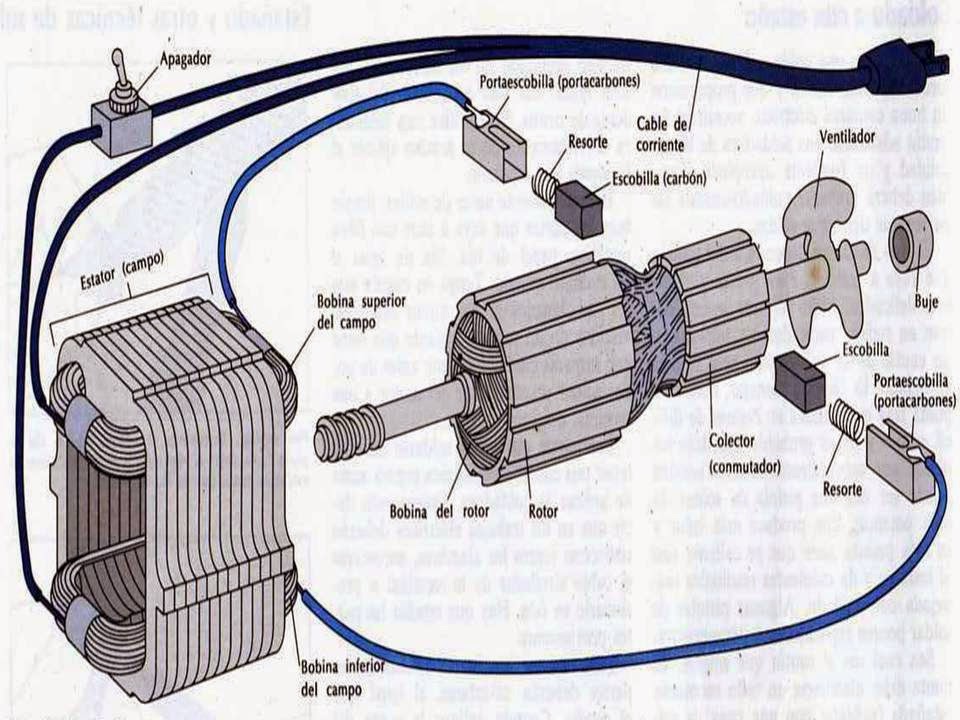
Como todas las maquinas eléctricas, un motor eléctrico está constituido por un circuito magnético y dos eléctricos, uno colocado en la parte fija (estator) y otro en la parte móvil (rotor), (véase la figura1).

Figura 1
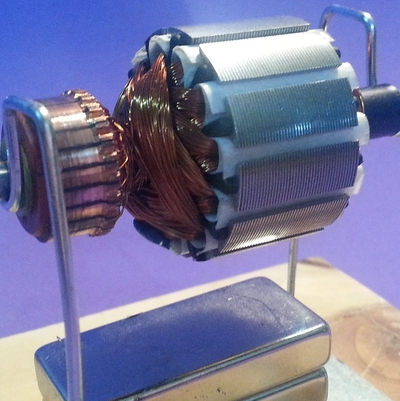
El circuito magnético de los motores eléctricos de corriente alterna está formado por chapas magnéticas apiladas y aisladas entre sí para eliminar el magnetismo remanente. (Véase la figura 2).
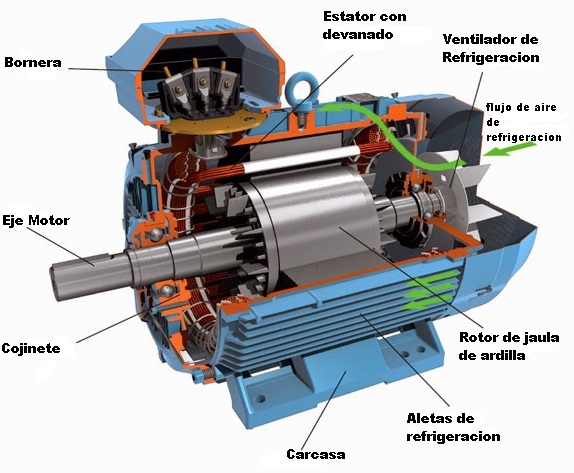
Figura 2
7
El cilindro se introduce en el interior del anillo y, para que pueda girar libremente, hay que dotarlo de un entrehierro constante. El anillo se dota de ranuras en su parte interior para colocar el bobinado inductor y se envuelve exteriormente por una pieza metálica con soporte llamada carcasa.
El cilindro se adosa al eje del motor y puede estar ranurado en su superficie para colocar el bobinado inducido (motores de rotor bobinado) o bien se le incorporan conductores de gran sección soldados a anillos del mismo material en los extremos del cilindro (motores de rotor en cortocircuito) similar a una jaula de ardilla, de ahí que reciban el nombre de rotor de jaula de ardilla. El eje se apoya en unos rodamientos de acero para evitar rozamientos y se saca al exterior para transmitir el movimiento, y lleva acoplado un ventilador para refrigeración. Los extremos de los bobinados se sacan al exterior y se conectan a la placa de bornes (Véase la figura 3).

Figura 3
8
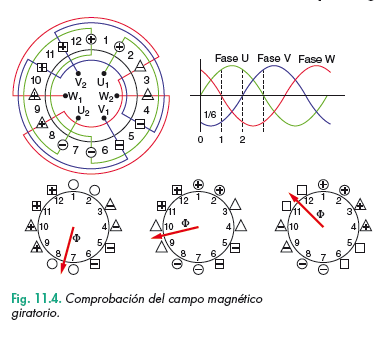
B. Campo magnetico giratorio
El campo magnético creado por un bobinado trifásico alimentado por corriente alterna es de valor constante pero giratorio y a la velocidad de sincronismo. Este fenómeno se puede comprobar con el estudio de las posiciones que va ocupando la resultante del flujo atendiendo a los sentidos de corriente que va tomando los conductores en el bobinado (Véase la figura 4).
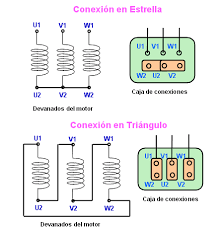
Figura 4
C. Principio de funcionamiento
El funcionamiento del motor asíncrono de inducción se basa en la acción del flujo giratorio generado en el circuito estatórico sobre las corrientes inducidas por dicho flujo en el circuito del rotor.
9
El flujo giratorio creado por el bobinado estatórico corta los conductores del rotor, por lo que se generan fuerzas electromotrices inducidas.Suponiendo cerrado el bobinado rotórico, es de entender que sus conductores serán conducidos por corrientes eléctricas. La acción mutua del flujo giratorio y las corrientes existentes en los conductores del rotor originan fuerzas electrodinámicas sobre los propios conductores que arrastran el rotor haciéndolo girar (Ley de Lenz).
La velocidad de rotación del rotor en los motores asíncronos de inducción es siempre inferior a la velocidad de sincronismo (velocidad del flujo giratorio). Para que se genere una fuerza electromotriz en los conductores del rotor ha de existir un movimiento relativo entre los conductores y el flujo giratorio. A la diferencia entre la velocidad del flujo giratorio y del rotor se le llama deslizamiento.
La velocidad de estos motores, según el principio de funcionamiento y la frecuencia industrial, tiene que ser una velocidad fija, algo menor que la de sincronismo. Gracias a los avances de la electrónica de potencia, actualmente se fabrican arrancadores estáticos que pueden regular la velocidad de estos motores actuando sobre la frecuencia de la alimentación del motor, es decir, convierten la frecuencia industrial de la red en una distinta que se aplica al motor. De ahí que reciban el nombre de convertidores de frecuencia, pudiendo regular la velocidad, amortiguar el arranque e incluso frenarlo.
10
2. Motores asíncronos trifásicos
Tipos y sistemas de arranque
Los motores asíncronos de inducción son aquellos en los que la velocidad de giro del rotor es algo inferior a la de sincronismo. Los podemos encontrar tanto monofásicos como trifásicos.
A. Motores trifásicos
Son motores en los que el bobinado inductor colocado en el estator está formado por tres bobinados independientes desplazados 120° eléctricos entre sí y alimentados por un sistema trifásico de corriente alterna. Los podemos encontrar de dos tipos:
Rotor en cortocircuito (jaula de ardilla)
Rotor bobinado
Tensiones e intensidades en el estator
Todo bobinado trifásico se puede conectar en estrella (todos los finales conectados en un punto común, alimentado el sistema por los otros extremos libres) o bien en triángulo (conectando el final de cada fase al principio de la fase siguiente, alimentando el sistema por los puntos de unión), como se puede apreciar en la figura 5.
12
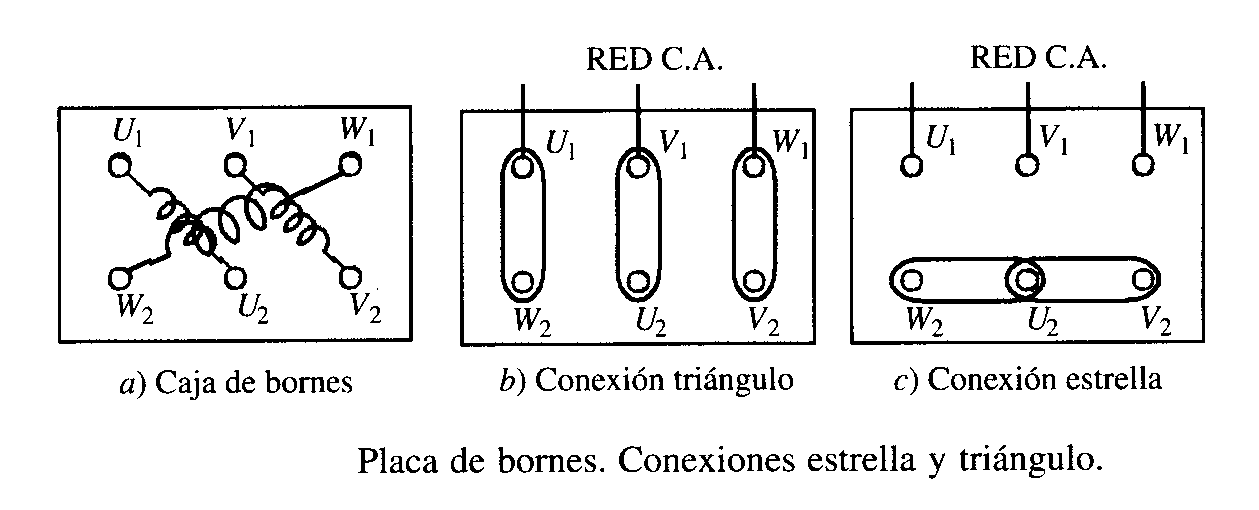
Figura 5
En la conexión estrella, la intensidad que recorre cada fase coincide con la intensidad de línea, mientras que la tensión que se aplica a cada fase es √3 menor que la tensión en línea. En la conexión triángulo, la intensidad que recorre cada fase es √3 menor que la intensidad de línea, mientras que la tensión a la que queda sometida cada fase coincide con la tensión en línea.
En estas condiciones, el motor se puede considerar como bitensión, ya que las tensiones normalizadas son de 230 o 400 V. Si un motor está diseñado para aplicarle 230 V a cada fase, lo podremos conectar a la red de 230 V en triángulo y a la red de 400 V en estrella. En ambos casos, la tensión que se le aplica a cada fase es de 230 V. En una y otra conexión, permanecen invariables los parámetros de potencia, par motor y velocidad. La conexión estrella o triángulo se realiza sobre la placa de bornes mediante puentes como se puede apreciar en la figura 6.
13
B. Motor de rotor en cortocircuito
El motor de rotor en cortocircuito es el de construcción más sencilla, como se ve en la figura 7, de funcionamiento más seguro y de fabricación más económica. Su único inconveniente es el de absorber una elevada intensidad en el arranque a la tensión de funcionamiento. En el momento de arranque este motor acoplado directamente a la red presenta un momento de rotación de 1,8 a 2 veces el de régimen, pero la intensidad absorbida en el arranque toma valores de 5 a 7 veces la nominal.
|
|
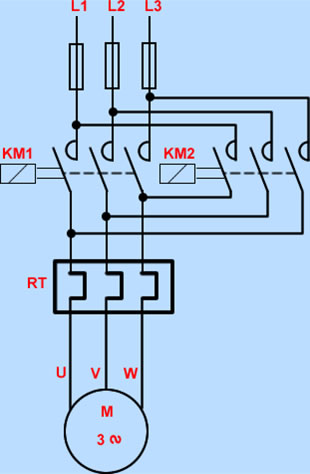
Arranque estrella triángulo (Ү – Δ) El procedimiento más empleado para el arranque de estos motores consiste en conectar el motor en estrella durante el periodo de arranque y, una vez lanzado, conectarlo en triángulo para que quede conectado a la tensión nominal. Para ello, se hace necesario intercalar entre el motor y la línea un conmutador manual especial que realice las conexiones de los extremos del bobinado del motor, sin realizar los puentes sobre la placa de los bornes, o mediante contactores. |
14
Arranque mediante autotransformador
Es un procedimiento que se utiliza para motores de gran potencia y consiste en intercambiar entre la red de alimentación y el motor un autotransformador, como se ve en la figura 8.
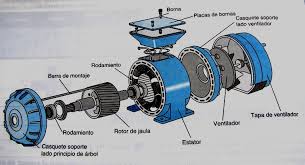
Figura 8
Este tiene distintas tomas de tensión reducida, por lo que, en el momento del arranque, al motor se le aplica la tensión menor disminuyendo la intensidad y se va elevando de forma progresiva hasta dejarlo conectado a la tensión de la red.
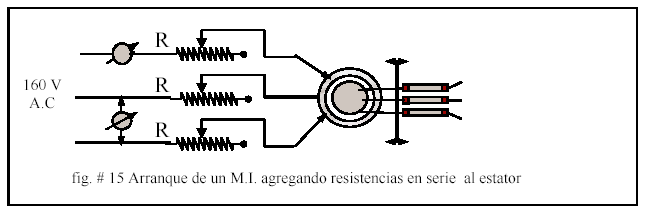
Arranque con resistencias en serie con el bobinado del estator
Es un procedimiento poco empleado que consiste en disponer un reóstato variable en serie con el bobinado estatórico. La puesta en marcha se hace con el reóstato al máximo de resistencia y se va disminuyendo hasta que el motor queda conectado a la tensión de la red. Su representación de forma esquemática se aprecia en la figura 9
16
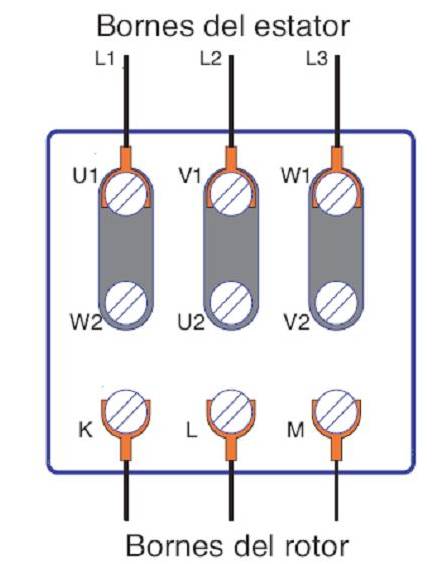
Figura 9
C. Motor de rotor bobinado y anillos rozantes
En este tipo de motores, el rotor va ranurado igual que el estator, y en él se coloca un bobinado normalmente trifásico similar al del estator conectado en estrella y los extremos libres se conectan a tres anillos de cobre, aislados y solidarios con el eje del rotor. La figura 10 muestra el despiece del motor de rotor bobinado.
Sobre los anillos, se colocan los portaescobillas, que a su vez se conectan a la placa de bornes del motor. Por eso, en la placa de bornes de estos motores aparecen nueve terminales como se muestra en la figura 11.
17
La gran ventaja que presentan estos motores es su par de arranque, ya que puede alcanzar hasta 2,5 veces el par nominal, mientras que la intensidad en el arranque es similar a la del par nominal. Para realizar la puesta en marcha, es necesaria la conexión de un reóstato de arranque conectado en serie con el bobinado del rotor, y una vez alcanzada la velocidad de régimen, se puentean los anillos en estrella.
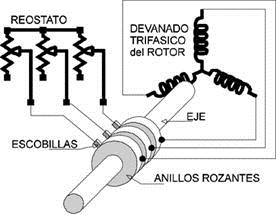
Figura 10
Estos motores tienen una aplicación muy específica y, dada su constitución, necesitan de un mantenimiento mucho más exhaustivo que los de rotor en cortocircuito.
18
D. Sentido de giro de los motores trifásicos
Para comprobar el campo magnético giratorio, se tenía en cuenta el sentido de circulación de la corriente por las tres fases del bobinado. En él se ve que la resultante del flujo tiene el sentido de giro de las agujas del reloj (sentido horario), por lo que el rotor es arrastrado en el mismo sentido de giro. Cuando necesitamos que el giro sea al contrario (sentido anti-horario), basta con permutar dos fases de alimentación del motor, como se ve en la figura 13, con lo que el motor gira en sentido opuesto.
|
|
Hay que tener cuidado de no permutar las tres fases pues es ese caso el motor sigue girando en el mismo sentido. Cuando una máquina ha de girar en ambos sentidos, necesitamos un conmutador (inversor) que realice la permuta de la alimentación sin tener que manipular las conexiones. Estos conmutadores han de estar dimensionados para la intensidad del motor y poseen tres posiciones, con el cero en el medio para conseguir que la inversión no se realice a contramarcha (véase la figura 14). |
19
3. Motores asíncronos monofásicos
En el ámbito doméstico tienen gran aplicación los motores eléctricos, por lo que es necesario que estos puedan funcionar en redes monofásicas. Los motores monofásicos son muy parecidos a los trifásicos, con el inconveniente de que su rendimiento y factor de potencia son inferiores. A igual potencia, el monofásico es más voluminoso que el trifásico y, siempre que las condiciones lo permitan, se utilizarán trifásicos. Los más utilizados son:
Motor monofásico con bobinado auxiliar de arranque
Motor de espira en cortocircuito
Motor universal
|
|
A. Motor monofásico con bobinado auxiliar de arranque, constitución y principio de funcionamientoComo todos los motores eléctricos, está formado por un circuito magnético y dos eléctricos. El circuito magnético está formado por el estator, donde se coloca el bobinado inductor y el rotor que incorpora el bobinado inducido, |
21
que en la mayoría de los casos suele ser de jaula de ardilla. De su nombre se desprende que utiliza un solo bobinado inductor, recorrido por una corriente alterna que crea un flujo también alterno, pero de dirección constante que, por sí solo, no es capaz de hacer girar al rotor. Si el rotor se encuentra ya girando, en los conductores del bobinado rotórico se generan fuerzas electromotrices que hacen que por el bobinado rotórico circulen corrientes, que a su vez generan un flujo de reacción desfasado 90° eléctricos respecto del principal.
|
|
La interacción entre estos dos flujos hace que el motor se comporte como un motor bifásico y el rotor continúe girando. De lo expresado anteriormente se desprende que el motor monofásico es incapaz de arrancar por sí solo pero, si se pone en marcha, se mantiene funcionando de forma normal hasta su desconexión. |

22
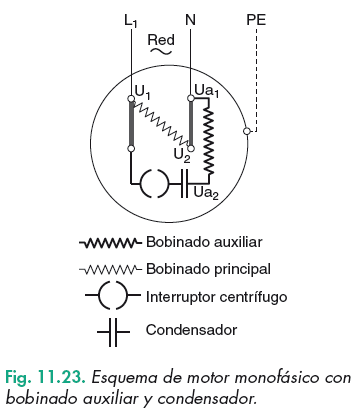
Por ello, hay que dotar a dicho motor de un dispositivo adecuado para iniciar el arranque. El más utilizado es incorporar al estator un bobinado auxiliar (véase figura 15) que funcione durante el período de arranque y que se desconecta una vez que el motor está en funcionamiento. En estas condiciones, el motor en el arranque es un motor bifásico, con sus bobinados desfasados 90° eléctricos, que hace que el motor se ponga en marcha. Una vez alcanzado el régimen de vueltas, se desconecta el bobinado auxiliar de forma que queda funcionando como motor monofásico.
Para realizar la desconexión del bobinado auxiliar, se utilizan los interruptores centrífugos acoplados en el eje del motor. Los bobinados se conectan en paralelo a la placa de bornes (véase las figuras 15,16).
|
|
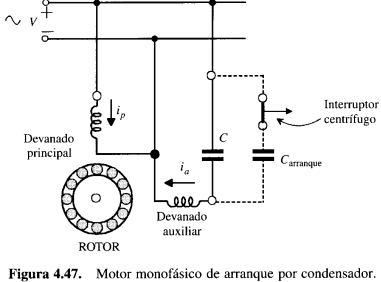
Como se ha explicado, el motor monofásico tiene un rendimiento, par de arranque y factor de potencia algo bajos. Para compensar dichos valores, se recurre a conectar en serie con el bobinado auxiliar un condensador electrolítico, con lo que se consiguen valores de rendimiento y para de arranque mucho mejores. Esto se puede apreciar esquemáticamente en la figura 15,16 y externamente en la figura 17. |
23
apreciar esquemáticamente en la figura 15,16 y externamente en la figura 17. La puesta en marcha se realiza mediante un interruptor bipolar manual adecuado a la intensidad del motor. Para invertir el sentido de giro, es necesario invertir las conexiones de uno de los bobinados del motor en la placa de bornes del motor (véase la figura 18). No confundir con invertir las conexiones de la alimentación ya que, en ese caso, el motor sigue girando en el mismo sentido.
|
|
En los motores actuales, las bobinas de arranque se conectan con la red a través de un condensador en serie que, a la frecuencia de la red y la velocidad nominal del motor, produce un desfase tal entre las corrientes de los devanados de arranque y servicio que se hace innecesario desconectarlas, por lo que estos motores ya no necesitan incorporar el interruptor centrífugo simplificando su constitución y funcionamiento. Existe una forma más sencilla de invertir el giro, como se muestra en el esquema de la figura 18, para estos motores |
25
B. Motor monofásico de espira en cortocircuito, constitución y principio de funcionamiento.
El motor de espira en cortocircuito está constituido por un estator de polos salientes y un rotor de jaula de ardilla. En la masa polar se incorpora una espira en cortocircuito que abarca un tercio aproximadamente del polo. Las bobinas rodean las masas polares, como se muestra en la figura 19.
|
|
Al alimentar las bobinas polares con una corriente alterna se produce un campo magnético alterno en el polo que por si no es capaz de poner en marcha el motor. El flujo que atraviesa la espira genera en esta una fuerza electromotriz inducida que hace que circule una corriente de elevado valor por la espira. Esto a su vez crea un flujo propio que se opone al flujo principal. En estas condiciones se obtiene un sistema de dos flujos en el que el flujo propio estará en retraso respecto del flujo principal, haciendo que el motor gire (véase la figura 20). |

26
El sentido de giro será siempre el que va desde el eje del polo hacia la espira en cortocircuito colocada en el mismo. Si por algún motivo necesitásemos invertir el giro, tendríamos que desmontar el motor e invertir todo el conjunto del rotor manteniendo la posición del estator.
Dado que estos motores tienen un rendimiento muy bajo, su utilización se limita a pequeñas potencias de hasta 300 W y para trabajos en ventilación, bombas de desagües de electrodomésticos, etc (véase la figura 21).
|
|
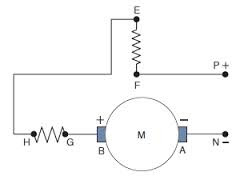
C. Motor universal, constitución y principio de funcionamientoEs un motor monofásico que puede funcionar tanto en corriente continua como alterna. Su constitución es esencialmente la del motor serie de corriente continua, y sus características de funcionamiento son análogas. En la figura 22 podemos ver representado de forma esquemática este motor. |
27
El motor serie de corriente continua se caracteriza por tener un fuerte par de arranque y su velocidad está en función inversa a la carga, llegando a embalarse cuando funciona en vacío. Funcionando en corriente alterna, este inconveniente se ve reducido porque su aplicación suele ser en motores de pequeña potencia y las perdidas por rozamiento, cojinetes, etc son elevadas con respecto a la total, por lo que no representan el peligro de embalarse.
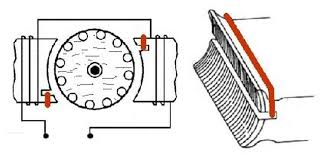
Figura 18
Alcanzan elocidades de hasta 20.000 revoluciones por minuto (rpm), que los hacen bastante idóneos para pequeños electrodomésticos y maquinas herramientas portátiles. El motor universal es, sin duda, el más utilizado en la industria del electrodoméstico. Tiene la ventaja de poder regular la velocidad sin grandes inconvenientes. (Véase figura 23)
28
Para que un motor de este tipo pueda funcionar con corriente alterna, es necesario que el empilado de su inductor (el núcleo de los electroimanes) sea de chapa magnética para evitar las perdidas en el hierro. El bobinado inductor de los motores universales suele ser bipolar, con dos bobinas inductoras. El motor universal funciona en corriente continua exactamente igual que un motor serie.
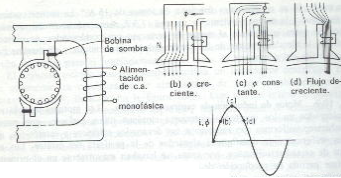
Figura 19
Si el motor se alimenta con corriente alterna, arranca por sí solo, ya que la corriente que recorre el bobinado inductor presenta cien alternancias por segundo, lo mismo que le ocurre a la corriente que recorre el bobinado inducido, por lo que el momento de rotación y el sentido de giro permanecen constantes.
29
Anexo. Figuras adicionales
|
|
|
|
|
|

30
Créditos y licencia
Créditos
|
Autor del libro: |
Guillermo Carvajal Rincón |
||
|
Diseño y programación del libro: |
Juan Guillermo Rivera Berrío |
||
|
Librería turn.js: |
Emmanuel García |
||
|
Herramienta de edición: |
DescartesJS |
||
|
Fuente: |
Amaranth |
Instituciones y licencia
![]()
![]()
![]()