P
A
B
O
x = 0.0 m
v = 0.00 m/s
a = 0.00 m/s²
v =0.00 m/s
x
a
x:undefined,y:undefined
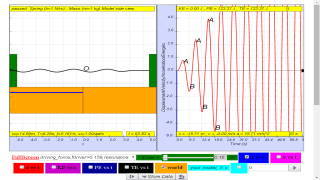
Model side view
Spring (k=1 N/m) - Mass (m=1 kg)
t = 0.00 s
T=6.28s, f=0.161/s, ω=1.00rad/s ,
xo=0.00m,
que actúe una fuerza.
No se moverá a menos
-5.5
-5.0
-4.5
-4.0
-3.5
-3.0
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
5.5
-0.5
-0.4
-0.4
-0.4
-0.4
-0.3
-0.3
-0.3
-0.3
-0.2
-0.2
-0.2
-0.1
-0.1
-0.1
-0.1
0.0
0.0
0.0
0.1
0.1
0.1
0.1
0.2
0.2
0.2
0.3
0.3
0.3
0.3
0.4
0.4
0.4
0.4
0.5
x =
y
Simple Harmonic Motion of Spring (k=1 N/m) - Mass (m=1 kg) Model
P
A
B
O
KE
PE
TE
Position (m)
t (s)
KE
PE
TE
x:undefined,y:undefined
b = 0.0, F = 0.5*sin (2*π*0.00*t)
KE = 0.00 J , PE = 0.00 J , TE = 0.00 J
t = 0.00 s
x = 0.00 m , v = 0.00 m/s a = 0.00 m/s² ,
-5.0
-4.5
-4.0
-3.5
-3.0
-2.5
-2.0
-1.5
-1.0
-0.5
0.0
0.5
1.0
1.5
2.0
2.5
3.0
3.5
4.0
4.5
5.0
Time (s)
Position//Velocity/Acceleration/Energies
Position/Velocity/Acceleration vs. Time
MAS_con_vo=0
MAS_con_xo=-2
MAS_con_xo=-1
MAS_con_xo=0,vo=0.1257
MAS_con_xo=0,vo=0.5236
MAS_con_xo=0,vo=2
MAS_con_xo=0,vo=6
MAS_con_xo=1
MAS_con_xo=1,vo=1
MAS_con_xo=2
MAS_con_xo=2,vo=0
no_amortiguado,b=0.0
levemente_amortiguado,b=0.1
críticamente_amortiguado,b=2.0
fuertemente_amortiguado,b=5.0
fuerza_motriz,fdriver=0.05
fuerza_motriz,fdriver=0.1
fuerza_motriz,fdriver=0.159,resonancia
fuerza_motriz,fdriver=0.2
fuerza_motriz,fdriver=0.3
fuerza_motriz,fdriver=0.4
fuerza_motriz,fdriver=0.5
fuerza_motriz,fdriver=0.6
fuerza_motriz,fdriver=0.7
fuerza_motriz,fdriver=1.0
fuerza_motriz,fdriver=2.0
fuerza_motriz,fdriver=4.0
fuerza_motriz,fdriver=6.0
fuerza_motriz,fdriver=8.0
fuerza_motriz,fdriver=10.0
fuerza_motriz,fdriver=12.0
user_defined
print
modelo
gráfica
ambos
x vs t
x vs t off
v vs t
v vs t off
a vs t
a vs t off
KE vs t
KE vs t off
PE vs t
PE vs t off
TE vs t
TE vs t off
show model
hide model
print
►
❚►
▼
↻
?your model, X =
0
2*sin(t)
2*cos(t)
0
-2*cos(t)
-1*cos(t)
1*sin(t+1.57)
1.41*sin(t+0.5236)
2*sin(3*t)
0.5*sin(1.05*t)
3*sin(1.57*t)
2*sin(1*t+(1.571))
show me
Title and author:
x,v,a vs t with damping b Simulator
weelookang@gmail.com
© 2018, weelookang@gmail.com. Compiled with EJS 6.0_beta (180814)
Released under a
license.
 weelookang@gmail.com
weelookang@gmail.com
 license.
license.