Observa que S no es suave, sino que es suave por partes; S se puede escribir como la unión de su base S1 y su parte superior esférica S2, y tanto S1 como S2 son suaves. Por lo tanto, para calcular ∬Sz2dS, escribimos esta integral como ∫S1z2dS+∬S2z2dS y calculamos las integrales ∫S1z2dS y ∫S2z2dS.
Primero, calculamos ∫S1z2dS. Para calcular esta integral necesitamos una parametrización de S1. Esta superficie es un disco en el plano z=1 centrado en (0,0,1). Para parametrizar este disco, necesitamos conocer su radio. Dado que el disco se forma donde el plano z=1 interseca la esfera x2+y2+z2=4, podemos sustituir z=1 en la ecuación x2+y2+z2=4:
x2+y2+1=4→x2+y2=3
Por lo tanto, el radio del disco es 3 y una parametrización de S1 es r(u,v)=⟨ucosv,usenv,1⟩,0≤u≤3,0≤v≤2π. Los vectores tangentes son tu=⟨cosv,senv,0⟩ y tv=⟨−usenv,ucosv,0⟩, y así
Ahora calculamos ∬S2dS. Para calcular esta integral, necesitamos una parametrización de S2. La parametrización de la esfera completa x2+y2+z2=4 es
r(ϕ,θ)=⟨2cosθsenϕ,2senθsenϕ,2cosϕ⟩,0≤θ≤2π,0≤ϕ≤π
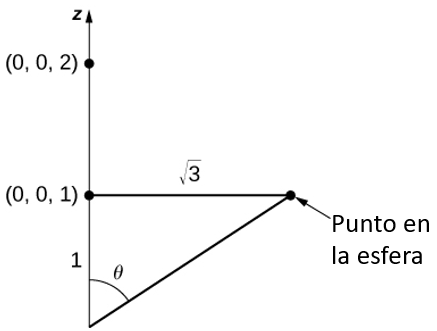
Dado que solo estamos tomando la parte de la esfera en o sobre el plano z=1, tenemos que restringir el dominio de ϕ. Para ver qué tan lejos se extiende este ángulo, observa que el ángulo se puede ubicar en un triángulo rectángulo, como se muestra en la siguiente figura (la 3 proviene del hecho de que la base de S es un disco con radio 3). Por lo tanto, la tangente de ϕ es 3, lo que implica que ϕ es π/6. Ahora tenemos una parametrización de S2:
r(ϕ,θ)=⟨2cosθsenϕ,2senθsenϕ,2cosϕ⟩,0≤θ≤2π,0≤ϕ≤π/3
Figura 6.73. El valor máximo de ϕ tiene un valor de tangente de 3.